 The excitement of auto racing comes from split-second decisions and daring passes by fearless drivers. Imagine that scene, but without the driver – the car alone, guided by the invisible hand of artificial intelligence. Can the rush of racing unfold without a driver steering the course? It turns out that it can.
The excitement of auto racing comes from split-second decisions and daring passes by fearless drivers. Imagine that scene, but without the driver – the car alone, guided by the invisible hand of artificial intelligence. Can the rush of racing unfold without a driver steering the course? It turns out that it can.
Enter autonomous racing, a field that’s not just about high-speed competition but also pushing the boundaries of what autonomous vehicles can achieve and improving their safety.
Over a century ago, at the dawn of automobiles, as society shifted from horse-drawn to motor-powered vehicles, there was public doubt about the safety and reliability of the new technology. Motorsport racing was organized to showcase the technological performance and safety of these horseless carriages. Similarly, autonomous racing is the modern arena to prove the reliability of autonomous vehicle technology as driverless cars begin to hit the streets.
Autonomous racing’s high-speed trials mirror the real-world challenges that autonomous vehicles face on streets: adjusting to unexpected changes and reacting in fractions of a second. Mastering these challenges on the track, where speeds are higher and reaction times shorter, leads to safer autonomous vehicles on the road.
I am a computer science professor who studies artificial intelligence, robotics and autonomous vehicles, and I lead the Cavalier Autonomous Racing team at the University of Virginia. The team competes in the Indy Autonomous Challenge, a global contest where universities pit fully autonomous Indy race cars against each other. Since its 2021 inception, the event has drawn top international teams to prestigious circuits like the Indianapolis Motor Speedway. The field, marked by both rivalry and teamwork, shows that collective problem-solving drives advances in autonomous vehicle safety.
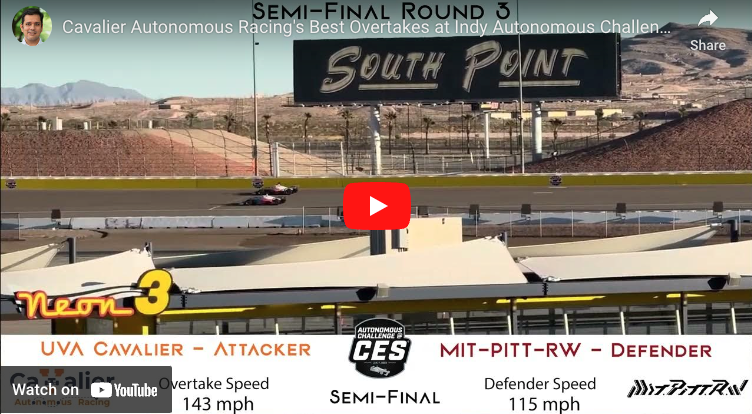
At the Indy Autonomous Challenge passing competition held at the 2024 Consumer Electronics Show in Las Vegas in January 2024, our Cavalier team clinched second place and hit speeds of 143 mph (230 kilometers per hour) while autonomously overtaking another race car, affirming its status as a leading American team. TUM Autonomous Motorsport from the Technical University of Munich won the event.
Pint-size beginnings
The field of autonomous racing didn’t begin with race cars on professional race tracks but with miniature cars at robotics conferences. In 2015, my colleagues and I engineered a 1/10 scale autonomous race car. We transformed a remote-controlled car into a small but powerful research and educational tool, which I named F1tenth, playing on the name of the traditional Formula One, or F1, race car. The F1tenth platform is now used by over 70 institutions worldwide to construct their miniaturized autonomous racers.
The F1tenth Autonomous Racing Grand Prix is now a marquee event at robotics conferences where teams from across the planet gather, each wielding vehicles that are identical in hardware and sensors, to engage in what is essentially an intense “battle of algorithms.” Victory on the track is claimed not by raw power but by the advanced AI algorithms’ control of the cars.

F1tenth has also emerged as an engaging and accessible gateway for students to delve into robotics research. Over the years, I’ve reached thousands of students via my courses and online lecture series, which explains the process of how to build, drive and autonomously race these vehicles.
Getting real
Today, the scope of our research has expanded significantly, advancing from small-scale models to actual autonomous Indy cars that compete at speeds of upward of 150 mph (241 kph), executing complex overtaking maneuvers with other autonomous vehicles on the racetrack. The cars are built on a modified version of the Indy NXT chassis and are outfitted with sensors and controllers to allow autonomous driving. Indy NXT race cars are used in professional racing and are slightly smaller versions of the Indy cars made famous by the Indianapolis 500.

The gritty reality of racing these advanced machines on real racetracks pushes the boundaries of what autonomous vehicles can do. Autonomous racing takes the challenges of robotics and AI to new levels, requiring researchers to refine our understanding of how machines perceive their environment, make safe decisions and control complex maneuvers at a high speed where traditional methods begin to falter.
Precision is critical, and the margin for error in steering and acceleration is razor-thin, requiring a sophisticated grasp and exact mathematical description of the car’s movement, aerodynamics and drivetrain system. In addition, autonomous racing researchers create algorithms that use data from cameras, radar and lidar, which is like radar but with lasers instead of radio waves, to steer around competitors and safely navigate the high-speed and unpredictable racing environment.
My team has shared the world’s first open dataset for autonomous racing, inviting researchers everywhere to join in refining the algorithms that could help define the future of autonomous vehicles.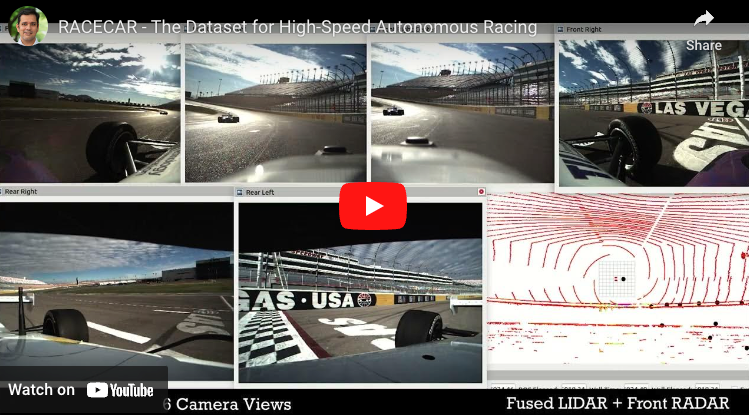
Crucible for autonomous vehicles
More than just a technological showcase, autonomous racing is a critical research frontier. When autonomous systems can reliably function in these extreme conditions, they inherently possess a buffer when operating in the ordinary conditions of street traffic.
Autonomous racing is a testbed where competition spurs innovation, collaboration fosters growth, and AI-controlled cars racing to the finish line chart a course toward safer autonomous vehicles.
(C) THE CONVERSATION

BIO
Dr. Madhur Behl is an Associate Professor in the departments of Computer Science, and Systems and Information Engineering, and a member of the Cyber-Physical Systems Link Lab at the University of Virginia.
He received his Ph.D. (2015) and M.S. (2012), in Electrical and Systems Engineering, both from the University of Pennsylvania; and his bachelor’s degree (2009) in ECE from PEC University of Technology in India.
He is the team principal of the Cavalier Autonomous Racing team. Behl is also the co-founder, organizer, and the race director for the F1/10 (F1tenth) International Autonomous Racing Competitions. He is an associate editor for the SAE Journal on Connected and Autonomous Vehicles, and a guest editor for the Journal of Field Robotics. He also serves on the on the Academic Advisory Council of the Partners for Automated Vehicle Education (PAVE) campaign, to help promote public understanding about autonomous vehicles and their potential benefits. Dr. Behl is an IEEE Senior Member and the recipient of the NSF CAREER Award (2021).